Chciałbym w tym artykule pokazać, jak zbudować model przeznaczony do lotów FPV.
Do tego celu wykorzystam samolot Penguin V2 który dostałem do testów ze sklepu ABC-RC.pl.
Model jest dedykowany pod FPV dzięki swojej budowie, ale zacznijmy od początku czyli od rozpakowania paczki.
Penguin przyszedł świetnie zapakowany, zresztą jak każdy produkt który kupiłem w ABC-RC, a jestem tam stałym klientem.
Model jest zapakowany w oryginalny karton, każdy element jest osobno zafoliowany.

Skrzydła są praktycznie gotowe - wklejone dźwigary oraz zainstalowana przedłużka do serwa. Naszym zadaniem jest zamocowanie orczyków. Wykonanie wzorowe. Z jednej strony to fajnie, że skrzydła są już poklejone, ale w planach miałem montaż nadajnika video i odbiornika RC na skrzydłach, co wiąże się w tym przypadku z ciągnięciem dodatkowych kabli. W takiej sytuacji musiałem zmienić plany.


Stateczniki- przy sterze poziomym należy wkleić dźwigar i przykręcić orczyk. Ster pionowy jest praktycznie gotowy, przykręcamy tylko orczyk.




Wielkim plusem modelu jest sposób instalacji stateczników. Wystarczy tylko jedna śrubka.




Kadłub jako jedyny element całego modelu przychodzi nie sklejony- i dobrze bo można co nieco pozmieniać. Naszym zadaniem jest wklejenie pokładu, wręgi silnika i sklejenie oby dwóch połówek.



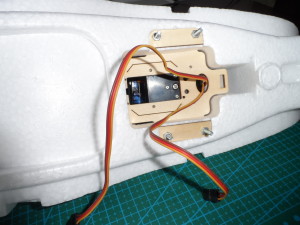
Ja jednak poprawiłem trochę fabrykę i serwo od steru wysokości zainstalowałem na samym sterze, a w miejscu przewidzianym pod serwo wkleiłem tylko węgiel jako wzmocnienie.


Przeglądając cały model stwierdziłem że jest to najsłabszy element i należy go wzmocnić. Na zdjęciu widzimy wklejoną rurkę o przekroju 10mm, przeciętą na połowę.
Kabina - bardzo pozytywne wrażenie zrobiła ma mnie kopułka kabiny. Wykonana z twardego tworzywa, wygląda na solidną, powinna być bardzo wytrzymała, a co za tym idzie dobrze chronić kamerę. Niestety trochę waży. Producent przygotował już sklejkę do montażu pantilta.



Instalacja serw-
model wyposażony będzie w serwa Corony. Dokładnie będą to serwa CS-929MG, o sile 2Kg i metalowych trybach.


Serwa w statecznikach wkleiłem na klej z zestawu. Przy okazji widzimy jak zainstalowane jest serwo przeniesione z kadłuba na ster wysokości.



Serwa w skrzydłach zamocowałem na piankę dwustronną dodatkowo wzmocniłem brzegi super glue. Pamiętajmy żeby wcześniej ustawić serwo w pozycje neutralną i zainstalować orczyk. Później będzie problem z wkręceniem śrubki.




Silnik- jako napęd będzie wykorzystany silnik EMAX GT2820/05 o mocy 540W.



Regulator, sprawdzony w boju HobbyKing 50A wyposażony w SBEC 4A.

Instalacja regulatora i silnika - pod mocowanie silnika podłożyłem po jednej podkładce dołączonej do zestawu. Podkładki są podłożone pod górne ramiona krzyżaka, co spowodowało, że silnik ma praktycznie zerowy kont. W praniu wyjdzie czy będzie ok. Regulator idealnie zmieścił się w komorze do niego przeznaczonej.


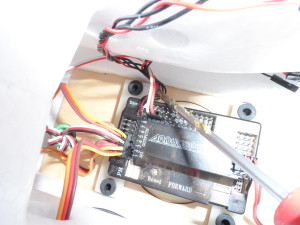
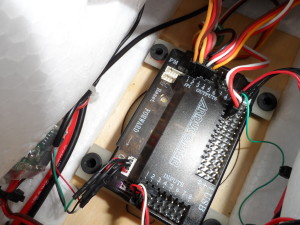
Serce Penguina - autopilot, który będzie dowodził samolotem to APM 2.5. Wersja ta świetnie nadaje się do samolotu, ponieważ wyposażona jest w wewnętrzny kompas. W przypadku samolotu mamy sporo miejsca na rozmieszczenie elementów, więc nie powinno być problemu z zakłóceniami.

APM będzie zamocowany na podstawce wyposażonej w wibroizolatory. Podstawkę wykonałem wycinając ją z laminatu 1mm. Wcześniej przed sklejeniem pokładu i kadłuba wywierciłem otwory i zainstalowałem podstawkę. Wygląda to tak.



Autopilot będzie połączony z odbiornikiem przez sygnał PPM. W tym celu zwieramy piny sygnałowe input 2 z 3 w APM-ie, a sygnał PPM podłączamy do wejścia nr. 1.

Podłączenie serw- serwa i regulator łączymy pod odpowiednie wyjścia kontrolera.
wyjście 1 - lotki, 2 - wysokość, 3 - silnik, 4 - ster kierunku
Następnie łączymy APM-a do komputera i przystępujemy do konfiguracji.
Pierwszą czynnością jest wybranie odpowiedniego portu na którym zainstalował się nasz autopilot. Następnie musimy wgrać odpowiednia wersję oprogramowania do kontrolera, w naszym przypadku jest to PLANE.
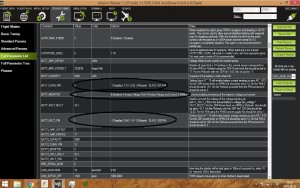
Jak wgrać odpowiedni soft można zobaczyć na innych filmach na ABC-RC. My skupimy się tylko na konfiguracji naszego samolotu. Pierwszą czynnością jaką musimy zrobić to kalibracją drążków. Otwieramy odpowiednia zakładkę i postępujemy zgodnie z instrukcją.
Za pomocą ENDPOINT-ów ustawiamy zakres pracy danego kanału, czyli min 1100 a max 1900. Bardzo ważne jest ustawienie środkowej pozycji, służy do tego celu parametr MIDPOINT który musimy odszukać w aparaturze a następnie ustawić wartość 1500. Dla wszystkich kanałów robimy identycznie.

Następnie kalibrujemy akcelerometr i poziom samolotu, konfigurator informuje nas krok po kroku co trzeba zrobić.